پردازش تصویر با پایتون قسمت بیست و یکم
تفاوت فیلتر کردن حوزه مکان با فرکانس
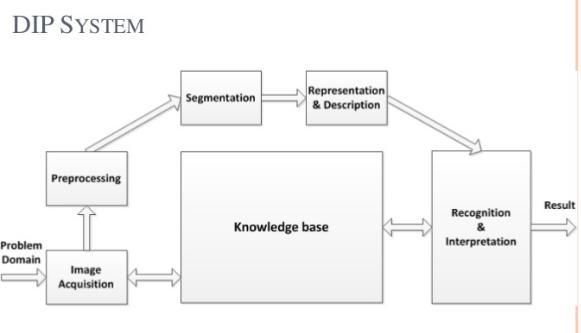
مراحل پایه در پردازش تصویر:
۱) پیش پردازش
۲) بخش بندی
۳) توصیف و نمایش
۴)تشخیص و تفسیر
پردازش تصویر: فرایند دستکاری یا انجام تغییرات مناسب بر رو ی تصویر(سیگنال دو بعدی)، جهت :
۱) درک بهتر برای انسان
۲) درک کامپیوتر (بینایی ماشین)
تصویر خاکستری تابعی از شدت روشنایی است :
f(x,y)= 0-255
ورودی های تابع، مختصات مکانی و خروجی شدت روشنایی است.
وقتی تصویر را از ورودی(دوربین) گرفتیم: نمونه برداری میکنیم تا تصویر به پیکسل های جدا از هم تقسیم شود.
برای نمونه برداری جهت دیجیتالی کردن تصویر، اگر ورودی ها را دیجیتالی کنیم به آ ن نمونه برداری میگویند.
اگر خروجی تابع را دیجیتالی کنیم به آن کوانتیزه کردن میگویند.
با ایجاد تصویر دیجیتالی میتوانیم فرض کنیم یک ماتریس دو بعدی داریم.
پیش پردازش: در این مرحله، تصویر را با حذف نویز ها یا بالا بردن کنتراست و… ارتقا میدهیم. با بالا رفتن کیفیت تصویر، هم استفاده ی راحتر برای انسان فراهم شده و هم بقیه پردازش ها ، بهتر انجام میشود.

برای بهبود و ارتقا کیفیت تصویر ، دو روش داریم:
۱) حوزه مکانی (Spatial Domain)
۲) حوزه فرکانسی
در حوزه مکان، پردازش ها و عملیات بر روی پیکسلها انجام میشود و یک تصویر با مشاهده سطح خاکستری توصیف میشود که به دو صورت است:
🔶فیلترهای مکانی بر روی ورودیها یا موقعیت مکانی تابع f(x,y) ،که با توجه به پیکسلهای همسایه انجام میشود. فیلتر ها به دو دسته خطی و غیر خطی هستند. فیلترهای مکانی، فیلتر هایی که اندازه تغییرات تصویر را مانند بالاگذر (تغییرات زیاد) یا پایین گذر (تغییرات کم) و … حذف میکنند.
🔸🔸 پایین گذر(مات و نرم کردن): تغییرات زیاد را حذف و تغییرات کم را رد میکند
خطی
۱) فیلتر میانگین: مقدار پیکسل های همسایه جایگزین پیکسل مرکزی میشود.(کانولوشن).
۲)گوسی .
غیرخطی:
۱)میانه
و …
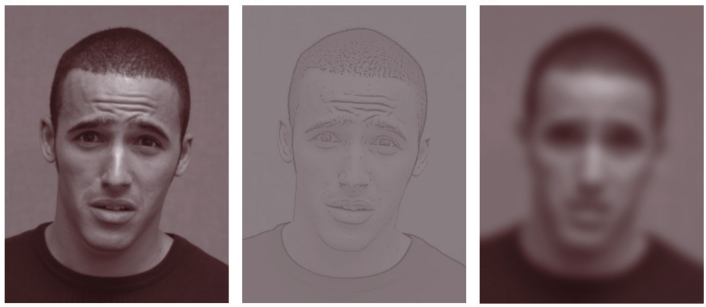
🔸🔸 بالا گذر(تیز و لبه دار کردن) : تغییرا ت کم را حذف و تغییرات زیاد را رد میکند.
۱) لاپلاسین
۲) سوبل
۳)و ….
🔶 تبدیلات بر روی خروجی تابع که نور یا شدت روشنایی نامیده میشود، انجام میشو د. در واقع تبدیلات بدون توجه به پیکسل های همسایه انجام میشود. تبدیلات بر روی شدت روشنایی (تبدیلات مکانی)شامل موارد زیر میباشد:
۱) تعدیل هیستوگرام یا Histogram Equalization
۲) تفریق (subtraction )
و ….
۲) در حوزه فرکانس، تصویر را با استفاده از تبدیل فوریه به حوزه فرکانس میبریم.
تبدیل فوریه دو بعدی، ابتدا روی تمام سطرهای تصویر انجام میشود و دوبار ه روی تمام ستونهای خروجی مرحله قبلی انجام میشود. با تبدیل فوریه هر سیگنالی را میشود با بینهایت موج سینوسی و کسینوسی دقیقا شبیه سازی کرد .
در واقع یک ماتریسی هم اندازه با تصویر بدست می آوریم که نواحی نزدیک به مرکز ماتریس فر کانسهای پایین و نواحی دو ر از مرکز فرکانسهای بالا هستند . اگر فرکانسهای بالا یا دور از مرکز را ۰ کنیم، تصویری خالی از نویز داریم . اگر فر کانس پایین را ۰ کنیم در واقع تصویر لبه دار داریم .
در این حوزه ما دیگر اطلاعات مکانی نداریم، یعنی نمیتوانیم بگوییم کجا به کجای تصویر مربوط است. ولی یک سری اطلاعات ارزشمند بدست می آوریم.
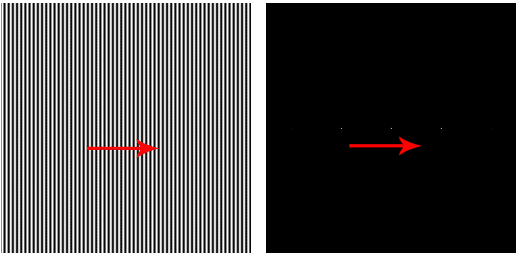
حوزه فرکانس، تفاوت پیکسلهای کنار همدیگر را به صورت نموداری در نظر میگیرد و توسط یک سری موجهای سینوسی و کسینوسی شبیه سازی میکند.
و همین امر باعث میشود نویز های مانند پریودیک که در حوزه مکان قابل حذف نیستند، حذف شوند. یعنی در حوزه فرکانس به صورت نقاطی سفید دیده میشوند که با ۰ یا سیاه کردن آن نقاط، ازبین میروند.
نکته
** این دو حوزه قابل تبدیل به یکدیگر هستند.
** برخی فیلتر ها در هر دو حوزه قابل اعمال هستند.
🆔@image_Process
🌐https://t.me/image_Process

{kind=link}